
With this tutorial you will learn:
- How to connect Pepper/NAO to RIZE
- How to connect a simulated NAO/Pepper robot (in Choregraphe) to RIZE
Connect Pepper/NAO to RIZE
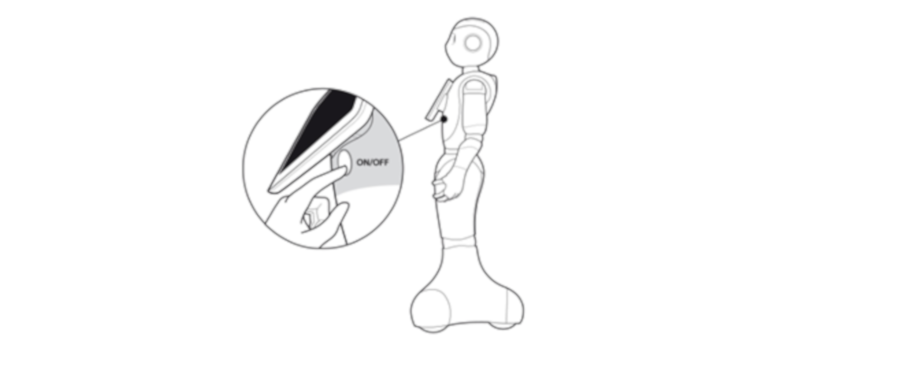
In RIZE select the button

Press the Pepper/NAO button in its chest (less than a second) to hear the IP address of the robot.
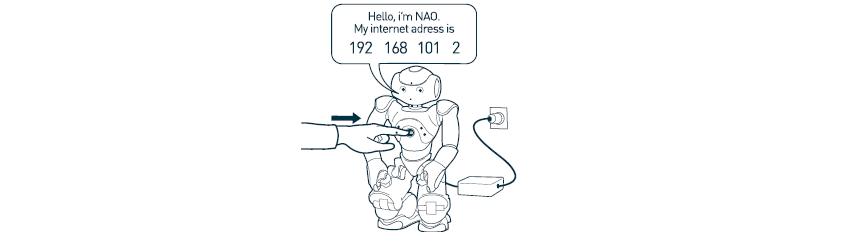
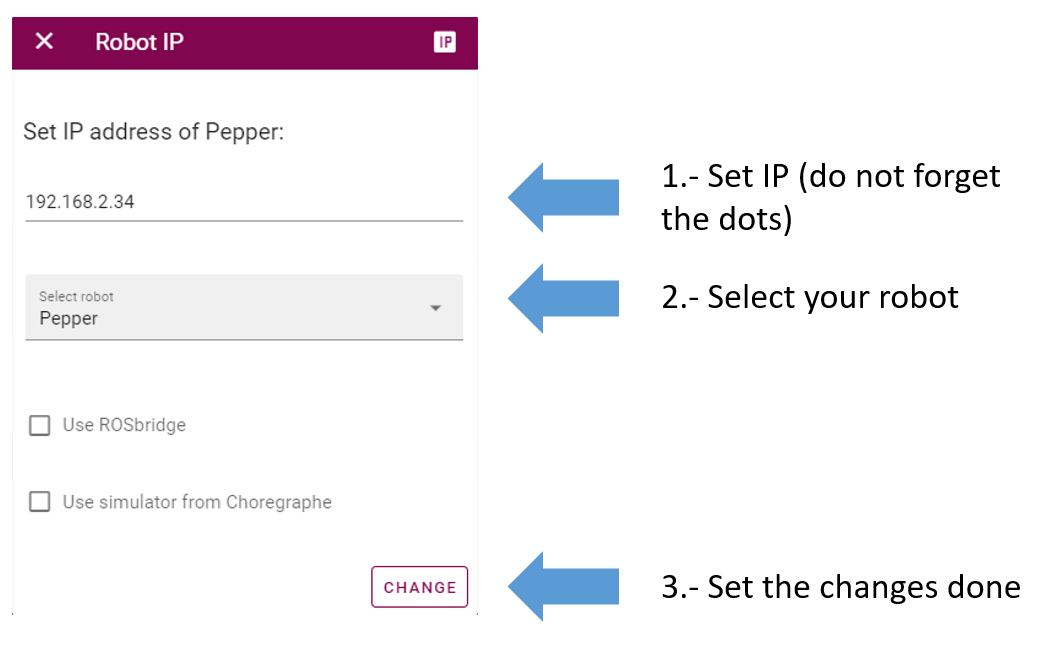
Then, write the IP (internet) address that the robot dictates in the next interface.
In the Home tab of RIZE Pepper press the button CONNECT and wait few seconds
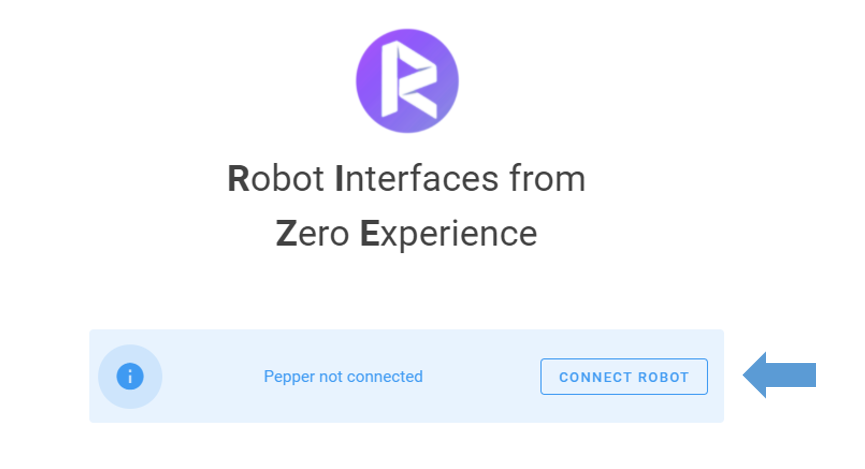
The robot will be successfully connected until appears the next message in green (a yellow or red color indicate a problem connecting the robot)

Use simulator of Choregraphe (Only Pepper and NAO)
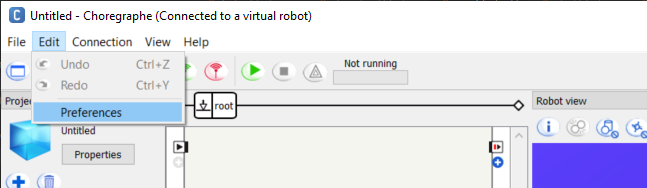
Open Choregraphe and select Edit/Preferences
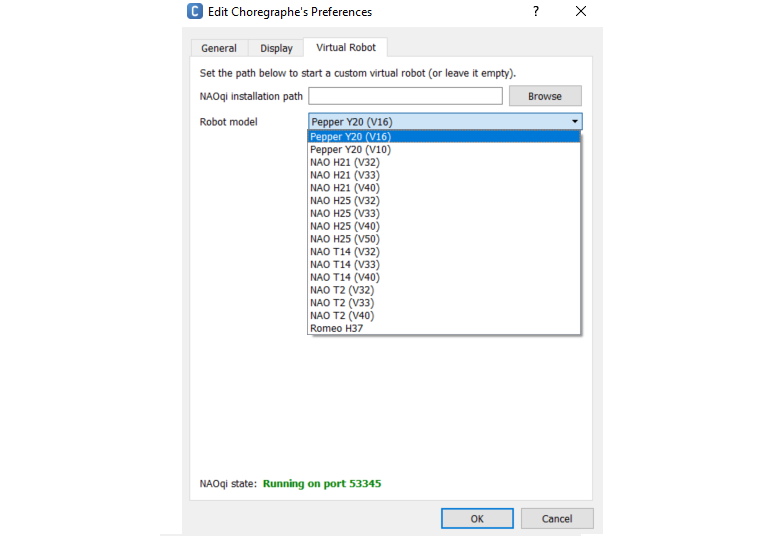
Select Virtual Robot tab. Then, in robot model select Pepper Y20 (V16) for Pepper or NAO H25 (V50) for NAO and press OK to close the window
Open RIZE for Pepper robot and select the button
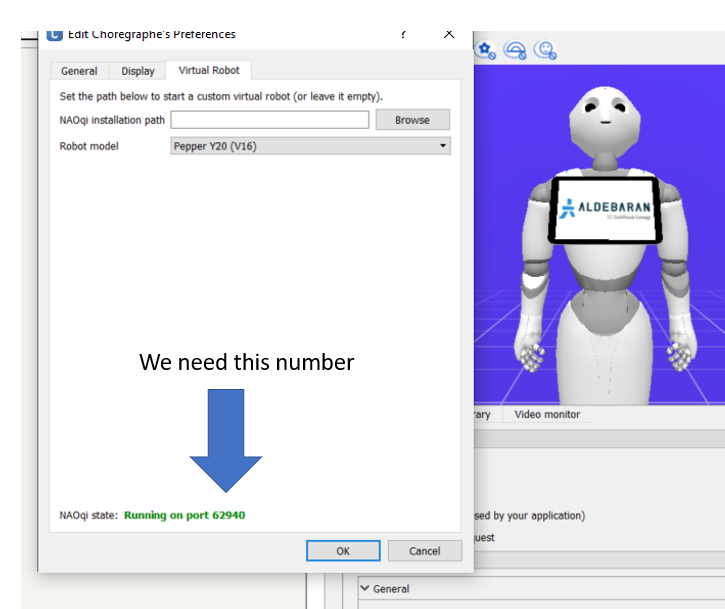
In Choregraphe open again Edit/Preferences/Virtual Robot . We need to set a special port number in RIZE (it changes every time you open Choregraphe). You can find this random number in the bottom of the window opened in this step on Choregraphe. An example is shown below (the number can vary for you).
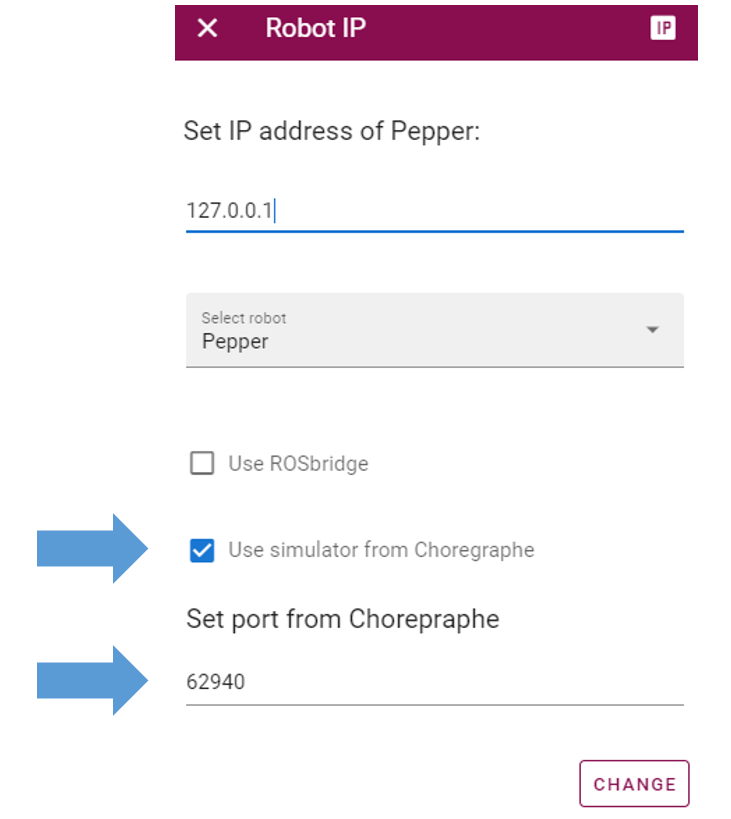
In RIZE select the option Use simulator from Choregraphe and set the port number obtained in the previous step
In the Home tab of RIZE Pepper press the button CONNECT and wait few seconds
The robot will be successfully connected until appears the next message in green (a yellow or red color indicate a problem connecting the robot)